اساس موتورهاي القايي AC
مقدمه
موتورهاي القايي AC عمومي ترين موتورهايي هستند كه در سامانه هاي كنترل حركت صنعتي و همچنين خانگي استفاده مي شوند.طراحي ساده و مستحكم , قيمت ارزان , هزينه نگه داري پايين و اتصال آسان و كامل به يك منبع نيروي AC امتيازات اصلي موتورهاي القايي AC هستند.انواع متنوعي از موتورهاي القايي AC در بازار موجود است.موتورهاي مختلف براي كارهاي مختلفي مناسب اند.با اينكه طراحي موتورهاي القايي AC آسانتر از موتورهاي DC است , ولي كنترل سرعت و گشتاور در انواع مختلف موتورهاي القايي AC نيازمند دركي عميقتر در طراحي و مشخصات در اين نوع موتورهاست.
اين نكته در اساس انواع مختلف , مشخصات آنها , انتخاب شرايط براي كاربريهاي مختلف و روشهاي كنترل مركزي يك موتورهاي القايي AC را مورد بحث قرار مي دهد.
اصل ساخت اوليه و كاربري
مانند بيشتر موتورها , يك موتورهاي القايي AC يك قسمت ثابت بيروني به نام استاتور و يك روتور كه در درون آن مي چرخد دارند , كه ميان آندو يك فاصله دقيق كارشناسي شده وجود دارد.به طور مجازي همه موتورهاي الكتريكي از ميدان مغناطيسي دوار براي گرداندن روتورشان استفاده مي كنند.يك موتور سه فاز القايي AC تنها نوعي است كه در آن ميدان مغناطيسي دوار به طور طبيعي بوسيله استاتور به خاطر طبيعت تغذيه گر آن توليد مي شود.در حالي كه موتورهاي DC به وسيله اي الكتريكي يا مكانيكي براي توليد اين ميدان دوار نياز دارند.يك موتور القايي AC تك فاز نيازمند يك وسيله الكتريكي خارجي براي توليد اين ميدان مغناطيسي چرخشي است.
در درون هر موتور دو سري آهنرباي مغناطيسي تعبيه شده است.در يك موتور القايي AC يك سري از مغناطيس شونده ها به خاطراينكه تغذيه AC به پيچه هاي استاتور متصل است در استاتور تعبيه شده اند.بخاطر طبيعت متناوب تغذيه ولتاژ AC بر اساس قانون لنز نيرويي الكترومغناطيسي به روتور وارد مي شود (درست شبيه ولتاژي كه در ثانويه ترانسفورماتور القا مي شود).بنابر اين سري ديگر از مغناطيس شونده ها خاصيت مغناطيسي پيدا مي كنند.-نام موتور القايي از اينجاست-.تعامل ميان اين مگنت ها انرژي چرخيدن يا تورك (گشتاور) را فراهم مي آورد.در نتيجه موتور در جهت گشتاو بوجود آمده چرخش مي كند.
استاتور
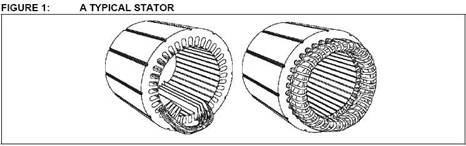
استاتور از چندين قطعه باريك آلومنيوم يا آهن سبك ساخته شده است.اين قطعات بصورت يك سيلندر تو خالي به هم منگنه و محكم شده اند(هسته استاتور) با شيارهايي كه در شكا يك نشان داده شده اند.سيم پيچهايي از سيم روكش دار در اين شيارها جاسازي شده اند.هر گروه پيچه با هسته اي كه آن را فرا گرفته يك آهنرباي مغناطيسي (با دو پل) را براي كار كردن با تغذيه AC شكل مي دهد.تعداد قطبهاي يك موتور القايي AC به اتصال دروني پيچه هاي استاتوربستگي دارد.پيچه هاي استاتور مستقيما به منبع انرژي متصل اند.آنها به صورتي متصل اند كه با برقراري تغذيه AC يك ميدان مغناطيسي چرخنده توليد مي شود.
روتور
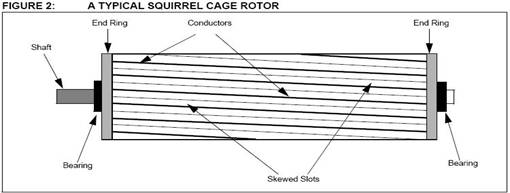
روتور از چندين قطعه مجزاي باريك فولادي كه ميانشان ميله هايي از مس يا آلومنيوم تعبيه شده ساخته شده است.در رايج ترين نوع روتور (روتور قفس سنجابي) اين ميله ها در انتهاي خود به صورت الكتريكي و مكانيكي بوسيله حلقه هايي به هم متصل شده اند.تقريبا 90 درصد از موتورهاي القايي داراي روتور قفس سنجابي مي باشند و اين به خاطر آن است كه اين نوع روتور ساختي مستحكم و ساده دارد.اين روتور از هسته اي چند تكه استوانه اي با محوري كه شكافهاي موازي براي جادادن رساناها درون آن دارد تشكيل شده است.هر شكاف يك ميله مسي يا آلومنيومي يا آلياژي را شامل مي شود.در اين ميله ها به طور دائمي بوسيله حلقه هاي انتهايي آنها همچنان كه در شكل دو مشاهده مي شود مدار كوتاه برقرار است.چون اين نوع مونتاژ درست شبيه قفس سنجاب است , اين نام براي آن انتخاب شده است.ميله اي روتور دقيقا با محور موازي نيستند.در عوض به دو دليل مهم قدري اريب نصب مي شوند.
دليل اول آنكه موتور با كاهش صوت مغناطيسي بدون صدا كاركرده و براي آنكه از هارمونيكها در شكافها كاسته شود. دليل دوم آن است كه گرايش روتور به هنگ كردن كمتر شود.دندانه هاي روتور به خاطر جذب مغناطيسي مستقيم (محض) تلاش مي كنند كه در مقابل دندانه هاي استاتور باقي بمانند.اين اتفاق هنگامي مي افتد كه تعداد دندانه هاي روتور و استاتور برابر باشند.
روتور بوسيله مهار هايي در دو انتها روي محور نصب شده ; يك انتهاي محور در حالت طبيعي براي انتقال نيرو بلندتر از طرف ديگر گرفته مي شود.ممكن است بعضي موتورها محوري فرعي در طرف ديگر(غير گردنده - غير منتقل كننده نيرو) براي اتصال دستگاههاي حسگر حالت(وضعيت) و سرعت داشته باشند.بين استاتور و روتور شكافي هوايي موجود است.بعلت القا انرژي از استاتور به روتور منتقل مي شود.تورك توليد شده به روتور نيرو داده و سپس براي چرخيدن به آن نيرو مي كند.صرف نظر از روتور استفاده شده قواعد كلي براي دوران يكي است.
سرعت يك موتور القايي
ميدان مغناطيسي اي كه در استاتور توليد ميشود با سرعت سنكرون مي چرخد.(Ns)

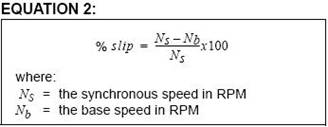
در روتور ميدان مغناطيسي توليد مي شود زيرا به طور طبيعي ولتاژ متناوب است. براي كاهش سرعت نسبي نسبت به (شار)استاتور , روتور چرخش را در همان جهتي كه شار استاتور دارد آغاز مي كند و تلاش مي كند تا به سرعت چرخش فلاكس نايل شود.با اينحال روتور هرگز موفق نمي شود كه به سرعت ميدان استاتور برسد.روتور از سرعت ميدان استاتور كندتر مي گردد.اين سرعت Base speed نام دارد.(Nb) تفاوتها ميان Ns و Nb Slip نام دارد.اسليپ مقادير مختلف فشار(مكانيكي) بستگي دارد.هر افزايشي در فشار موجب كندتر كار كردن روتور و افزايش اسليپ مي شود.برعكس كاهش فشار سبب سرعت گرفتن روتور و كاهش اسليپ مي شود.اسليپ بوسيله درصد نشان داده شده و با فرمول زير مشخص مي شود.
معادله كنترل گشتاور عملكرد موتور
سيستم بار موتور ميتواند بوسيله معادله اساسي زير بيان شود.
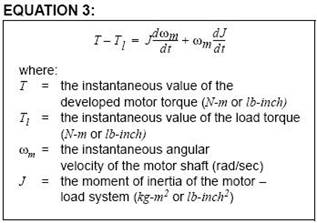
براي چرخشهايي با ماند ثابت داريم: (dj / dt) = 0

اين نشان ميدهد كه گشتاور ايجادشده توسط موتوربا گشتاوربار نسبت عكس دارد.
مولفه گشتاور J(dw/dt)گشتاور پويا ناميده مي شود زيرا فقط در اعمال زودگذر و آني ظاهر ميشود.اينكه چرخش تسريع يا كند ميشود به اين بستگي دارد كه T از T1 بزرگتر يا كوچكتر باشد.در هنگام شتاب گيري موتور نبايد تنها گشتاور بار راتغذيه كند بلكه بايد مولفه گشتاور اضافي اي را J(dwm /dt) براي چيره شدن به اينرسي داشته باشد.در درايوهايي با اينرسي بزرگ مانند قطارهاي الكتريكي گشتاور موتور براي مقدار بسيار كافي شتابگيري بايد از گشتاور بار تجاوز كند.در درايوهايي با نياز به واكنش سريع گشتاور موتور بايد در بالاترين مقدارنگه داشته شده و سيستم بار موتور با كمترين مقدار ممكن اينرسي طراحي شده باشد.انرژي مربوط به گشتاور پويا J(dwm /dt) بصورت انرژي جنبشي (KE) بوجود آمده J(w2m /2) ذخيره مي شود.در زمان شتابگيري گشتاور پويا J(dwm /dt) علامت منفي دارد.ازين رو به گشتاور توليدي موتور T و حفظ تحرك چرخش بوسيله استخراج انرژي از انرژي جنبشي ذخيره شده كمك مي كند.
براي خلاصه , براي حالت دائمي چرخش موتورگشتاوري توليدي موتور T بايد هميشه با گشتاور لازم بار T1 برابر باشد.
منحني سرعت گشتاور موتور القايي سه فاز معمولي در شكل 11 نشان داده شده است.
ويژگي استارتينگ
موتورهاي القايي درحالت خاموش مانند يك ترانسفورماتور درمدار كوتاه عمل مي كنند و اگر كاملا به منبع ولتاژ متصل شوند جرياني بسيار بزرگ مي كشند كه اين جريان به جريان روتور قفل شده معروف است. همچنين گشتاوري توليد مي كند كه به گشتاور روتور قفل شناخته مي شود.گشتاور روتور قفل (LRT) و جريان روتور قفل (LRC) تابع ولتاژ پايانه و تابع طراحي آن مي باشند.هنگامي كه موتور شتاب مي گيرد اگر ولتاژ ثابت نگه داشته شود هردوي گشتاور و جريان تلاش مي كنند كه سرعت روتور را تغير دهند.
جريان استارت يك موتور با ولتاژ ثابت با شتاب گرفتن موتوربطوربسيار آهسته كاهش ميابد و صرفا روند نزولي ميابد.به خصوص وقتي كه موتور به 80 درصد سرعت كامل خود ميرسد.منحنيهاي واقعي براي موتورهاي القايي ميتوانند ميان طراحي هاي مختلف بسياربسيارمتفاوت باشند ولي عموما گرايش آنها به جريان بالاست تا وقتي كه متور تقريبا به سرعت كامل ميرسد.LRC يك موتور ميتواند در محدوده از500 درصد تا 1400 درصد جريان ظرفيت تكميل (FLC) باشد.معمولا موتورهاي خوب در محدوده 550 تا 750درصد از FLC مياشند.
گشتاور استارت يك موتور القايي كه با ولتاژ ثابت آغاز به كار مي كند , كمي به گشتاور كمينه افت مي كند كه به Pull-Up torque شناخته مي شود.و با شتاب گرفتن موتور در تقريبا سرعت بيشينه به يك گشتاور بيشينه افزايش يافته كه به گشتاور شكست يا Pull-Out torque معروف است و سپس در سرعت سنكرون به صفر نزول مي كند.منحني گشتاور استارت برخلاف سرعت روتور به ولتاژ پايانه و طراحي روتور بستگي دارد.
LRT يك موتور القايي ميتواند از مقدار كم 60 درصد FLT تا 350 درصد آن تغيير كند.Pull-Up torque نيز مي تواند به كمي 40 درصد FLT و گشتاور شكست هم مي تواند تا حد 350 درصد FLT باشد.معمولا LRT ها براي موتورهاي بزرگ تا متوسط دستورا 120 تا 280 درصد FLT ميباشد.ضريب توان (PF) با شتاب گرفتن موتور از استارت از 1 تا 25 به مقدار بيشينه افزايش يافته وسپس با رسيدن موتور به سرعت نهايي دوباره سقوط مينمايد.
ويژگي عملكرد
هنگامي كه موتوربه سرعت خود سرعتي كه به تعداد قطبهاي استاتور مربوط است رسيده است در ميزان خطاي كمي نسبت به سرعت سنكرون(Slip) كار مي كند.معمولا ميزان اين كاستي براي يك موتور قفس سنجابي كمتر از 5 درصد است.اسليپ حقيقي نوع خاصي از موتور به طراحي آن بستگي دارد.معمولا سرعت اصلي يك موتور القايي چهار قطبي بين 1420 تا 1480 دور در دقيقه در فركانس 50 هرتز متغير است.در حالي كه سرعت سنكرون 1500 دور در دقيقه در فركانس 50 هرتز است.
ولتاژ كشيده شده توسط موتور القايي دو جزء دارد:جزءانفعالي (جريان مغناطيسي سازي) و مولفه موثر (جريان كاري).جريان مغناطيسي سازي مستقل از بار ولي وابسته به طراحي و ولتاژ استاتور مي باشد.جريان مغناطيسي سازي حقيقي موتور القايي مي تواند از مقدار كم 20 درصد FLC براي دستگاه بزرگ دو پل تا بزرگي 60 درصد براي نمونه كوچك هشت پل متغير باشد.جريان كاري موتوربا بار نسبت مستقيم دارد.
گرايش دستگاههاي بزرگ و پرسرعت به ارائه دادن جريان مغناطيسي سازي كم است درحالي كه گرايش ماشينهاي كوچك و كم سرعت به جريان بالاي مغناطيسي سازي ميباشد.يك موتور معمولي در سايز متوسط و با چهار پلجريان مغناطيسي سازي اي معادل 33 درصد FLC دارد.
يك جريان كم مغناطيسي سازي اتلاف كم آهن را دربردارد در حالي كه جريان بزرگ مغناطيسي سازي افزايش در اتلاف آهن و درنتيجه كاهش بازده عملكرد را در پي دارد.
معمولا بازده عملكرد يك موتور القايي در سه چهارم ظرفيت حداكثر است و از 60درصد براي موتورهاي كوچك كم سرعت تا بيش از 92درصد براي موتورهاي بزرگ پرسرعت متنوع است.ضرايب توان و بازده ها عموما در مشخصات موتورها ذكر شده است.
مشخصه بار
در واقعيت كاربريهايي با مقادير مختلف بار با منحنيهاي مختلف سرعت گشتاور وجود دارد.براي نمونه: گشتاور ثابت با بار با سرعت متغير(در كمپرسورهاي پيچشي تسمه نقاله ها تغذيه كننده ها) , گشتاور متغير با بار با سرعت متغير(در فن , پمپ) , توان بار ثابت(در محركهاي انقباضي) , توان و گشتاور بار ثابت(در محركهاي سيم پيچي) و گشتاور بالاي استارت و دورگرفتن ناگهاني كه در گشتاور ثابت بار(در پمپهاي پيچشي , فشرده سازها) مشاهده مي شود.
گفته مي شود سيستم بار موتور پايدار است هرگاه گشتاور توليدي موتور با گشتاور مورد نياز بار برابر باشد.در اين حالت موتور در يك سرعت ثابت در حالتي مانا كار مي كند.پاسخگويي موتور به هر اختلال ايده اي در مورد پايداري سيستم بار آن به ما ميدهد.اين مفهوم به ما در انتخاب سريع نوع موتور براي كاربري خاصي كمك مي كند.
در بيشتر كاربريها , واحد زماني الكتريكي در مقابل واحد زماني مكانيكي آن ناچيز است.ازين رو درهنگام اعمال آني ميتوان موتور را در تعادل الكتريكي فرض كرد كه بر اينكه منحني سرعت – گشتاور حالت پايدار براي اعمال آني نيز صادق است دلالت دارد.
بعنوان نمونه شكل 12 منحنيهاي سرعت – گشتاور موتوري با دو بار مختلف نشان ميدهد.ميتوان سامانه را بعد از به حالت اول بازگشتن پس از كمي تغيير به سبب اختلالي در موتور يا بار ثابت ناميد.
براي نمونه اختلال سبب كاهش wm? در سرعت ميشود.درحالت اول در سرعتي جديد گشتاور موتور T از گشتاور بار T1 بزرگتر است.بنابراين موتور شتاب گرفته و عمليات به X باز خواهد گشت.به طور مشابه افزايشwm? در سرعت كه بوسيله يك اختلال بوجود ميايد و گشتاور بار را از گشتاور موتور بيشتر خواهد كرد كاهش سرعت موتور وبازگشت حالت عمليات به نقطه X را نتيجه ميدهد.بنابراين سيستم در نقطه X پادار است.
در حالت دوم كاهش سرعت سبب بيشتر شدن گشتاور بار از گشتاور مووتور ميشود.چرخش كل كند شده و حالت دستگاه از نقطه Y دور ميشود.به طور مشابه افزايشيدر سرعت گشتاور موتور را از گشتاور بار فزوني داده كه موجب دور شدن بيشتر حالت دستگاه از نقطه Y ميشود.بنابر اين سامانه در نقطه Y ناپايدار است.
اين نشان ميدهد كه موتور انتخاب شده براي كاربري در حالت اول صحيح است و انتخاب دوم انتخابي اشتباه ميباشد و براي عمل مورد نظر بايد تغيير كند.

انوع بار با منحنيهاي سرعت – گشتاورشان در زير توضيح داده شده اند.
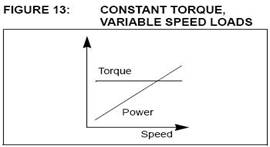
بارهاي با سرعت متغير و گشتاور ثابت
گشتاوري كه اين نوع بارها نيازدارند صرفنظر از سرعت , ثابت اند.درمقابل نيرو با سرعت نسبت خطي دارد.دستگاههايي نظير كمپرسورهاي پيچشي , تسمه نقاله ها و تغذيه گرها(سوخت رسانها) چنين مشخصات باري دارند.
بارهاي با گشتاور متغير و سرعت متغير
اين عمومي ترين نوع بار درصنايع بوده و بيشتر اوقات به عنوان بار با گشتاور نمايي شناخته ميشود.درحالي كه نيرو مكعب سرعت است گشتاور مربع سرعت ميباشد.اين مشخصات معمول سرعت – گشتاور يك فن يا پمپ است.

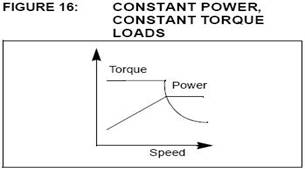
بارهاي با توان ثابت
اين نوع بار كمياب است ولي گاهي در صنايع مورد استفاده دارد.درحالي كه گشتاور تغيير مي كند توان ثابت استگشتاور با سرعت نسبت عكس داشته كه به طور نظري گشتاور بينهايت در سرعت صفر و سرعت بينهايت در گشتاور صفر را در بر دارد.در عمل هميشه به مقدار متناهي گشتاور شكست نياز است.اين نوع بار مشخصه محرركهاي انقباضي است كه براي شتابگيري اوليه به گشتاور بالا در سرعت پايين و گشتاوري بسيار كاهش يافته در هنگام كاركرد نياز دارد.

بارهاي با توان ثابت و گشتاور ثابت
اين نوع بار در كارخانه كاغذ استفاده ميشود.در اين نوع بار درحاليكه سرعت افزايش ميابد , گشتاور ثابت مانده و توان بشكل خطي افزايش ميابد.هنگامي كه گشتاور شروع به كاهش مي كند آنگاه توان ثابت مي ماند.
گشتاور استارت و دورگيري بالا و در ادامه گشتاور ثابت
اين نوع بار با گشتاوري بسيار بالا در بسامدهايي نسبتا كم مشخص ميشود.در كاربريهايي نظير فشرده سازها و پمپهاي پيچشي.

بر گرفته از؛ هوپا